TG600 current vector inverter
/
Model: TG600
Inverter
【Performance】
● TG 600 module features its whole-course magnetic flux vector control. Based on the modern control theory, it with the magnetic flux vector review and control technology directly controls the torque of the electric machine to operate at low speed (1 percent of rated revolution). It may provide the high-lifting torque and guarantee accident-free operation even without PG closed circuit. As PG control is enhanced, it may even provide with zero-speed and full torque control.
【Keyword】
● frequency inverter, frequency inverter vs vfd, motor speed control, motor inverter, ac motor drive, motor inverter drive, motor inverter function, 3 phase inverter, variable frequency drive basics
[TG700 Servo Controller IP] [TG900 Variable Load Drive] [TG1000 High Frequency Inverter]
[Energy Saving Module] [Waterproof Energy Saving Module]
【FEATURE】
- TG600 inverter control the torque output through the precise torque limit function. In case that any breakdown happens, it may ensure the safe operation and prevent from any impact. TG600 inverter evidences its durability and perfect performance in the application of heavy-duty machine
- Cases of flux vector control with PG closed circuit
- TG600 inverter features its full-speed and highly-precise operation even under the condition of load change.
- Persistent-speed control from light to heavy load (without PG) Speed detection rate ± 0.2%0-100% load (PG for ±0.02)
- An inverter contains four types of control methods: standard V/F control, V/F control with PC closed circuit, current flux vector control without a sensor and flux vector control with PG closed circuit. Through the simple optional parameter, TG600 module may be widely applied on different fields from the highly-precise servo machine to the driving of multi-system of electric machine. It helps the user to standardize each application through an inverter.
- The default of an inverter is current flux vector control without a sensor.
- For multi- electric machine driving, the inverter can be set as V/F control method. Highly-precise vector operation can be fulfilled based on the electromotor with PG.
- In the case of PG control, PG speed control card is required.
- For continuous operation with high torque in low speed, please use Top Gin professional inverter.
- It provides outstanding drive performance, rich industrial applications, low failure rate, easy maintenance. Help energy users to save operating costs efficiently and to enhance competitiveness.
- Advantage of its stable system, compact size, easy installation, flexible application and reliable quality
- It operates in flux mode, allowing fast response and accurate servo positioning control and speed control, resulting in maximum torque even at zero speed.
- Zero speed with 150% of the holding torque, while the position control can reach point to point and the relative length of the application function, the most suitable for high - end industrial machinery applications.
- To meet the heavy / impact load applications, to achieve rapid response, safe and stable operation
- Modular design for easy maintenance and many extensions
- General field oriented vector control drives (FOC:Field Oriented Control)
-
To improve computing speed and support motor with high-performance current vector control.
-
Communication capabilities and can be used for high-precision monitoring.
- Motor parameters auto-tuning and generalized vector control
- Auto-tuning function, help user to reduce mass setup time
【FUNCTION】
- Supports Open/Close loop control of motors and speed/torque/position control mode
- Output frequency: 0 ~400 Hz (Standard models)
- Optional built-in EMC Filter
- Optional built-in slots do I/O expansion, PG card and communication card installation
- Senseless vector control 150% torque at 0.5Hz, speed ratio of 1: 100
- When used in conjunction with the speed feedback function, the holding torque can reach 150%
- Overload: up to 150% in one minute, two seconds up to 200%
- Motor parameters and load capacity can be estimated
- Excellent four-quadrant torque control and torque limitation
- Low voltage transient compensation
- Complete alarm protection: over-current, regenerative voltage, motor overheating, IGBT module overheating
- Low noise modulation technology
- High-precision current detection, long life design, enhanced environmental tolerance and accurate and fast to achieve the perfect protection
- Complies with global safety standards, including CE, UL and cUL
- RS-485 communication interface (RJ-45) with MODBUS protocol
- 16-speed preset speed and 15-speed programmable operation
- Four groups of acceleration and deceleration time selection and independent acceleration and deceleration S curve selection
- Built-in sleep / revival function
【APPLICATION】
- Drilling machine, NC lathe, Textile machines, Woodworking machines, Air compressors, Crane application, Medium and low speed guest lift, Machine tools, Machine tool, Press system control, Packaging machines, Electronics, Fans, Pumps , PCB forming machine
[TG700 Servo Controller IP] [TG900 Variable Load Drive] [TG1000 High Frequency Inverter]
[Energy Saving Module] [Waterproof Energy Saving Module]
【SPECIFICATION】
|
Output characteristics |
Standard 220 class |
L15 | L20 | L30 | L50 | L75 | L100 | L150 | L200 | L300 | L400 |
|
Motor (KW) |
0.75 | 1.5 | 2.2 | 3.7 | 5.5 | 7.5 | 11 | 15 | 22 | 30 | |
|
Inverter capacity (KVA) |
2.3 | 2.5 | 4.3 | 6.8 | 9.9 | 13.5 | 19.5 | 24.5 | 37.5 | 51 | |
|
Rated output current (A) |
6 | 8 | 11 | 18 | 26 | 34 | 50 | 65 | 96 | 132 | |
|
Motor rated current (A) |
3.3 | 6.2 | 8.5 | 14 | 19.6 | 26.6 | 39.7 | 53 | 77.2 | 105 | |
|
The maximum output voltage |
Three-phase 200~240V (corresponding to input voltage) |
||||||||||
|
Reated output frequency |
400Hz | ||||||||||
|
Output characteristics |
Standard 220 class |
L500 | L600 | L750 | L1000 | L1250 | L1500 | L1750 | L2000 | L2500 | L3000 |
|
Motor (KW) |
37 | 45 | 55 | 75 | 94 | 110 | 109 | 160 | 185 | 225 | |
|
Inverter capacity (KVA) |
62 | 70 | 85 | 110 | 138 | 165 | 193 | 230 | 260 | 312 | |
|
Rated output current (A) |
163 | 183 | 224 | 330 | 413 | 485 | 525 | 600 | 700 | 840 | |
|
Motor rated current (A) |
3.3 | 6.2 | 8.5 | 14 | 19.6 | 26.6 | 39.7 | 53 | 77.2 | 105 | |
|
The maximum output voltage |
Three-phase 200~240V (corresponding to input voltage) |
||||||||||
|
Reated output frequency |
400Hz | ||||||||||
|
Power supply |
Reated onput voltage and frequency |
Three-phase 200~240V 50/60Hz |
|||||||||
|
Allowable voltage fluctuation |
+10%,-15% | ||||||||||
|
Allowable frequency fluctuation |
±5% | ||||||||||
|
Output characteristics |
Standard 380/440 class |
H15 | H20 | H30 | H50 | H75 | H100 | H150 | H200 | H300 | H400 | H500 | H600 | H750 |
|
Motor (KW) |
0.75 | 1.5 | 2.2 | 3.7 | 5.5 | 7.5 | 11 | 15 | 22 | 30 | 37 | 45 | 55 | |
|
Inverter capacity (KVA) |
2.6 | 3.7 | 4.7 | 6.7 | 12 | 16 | 21.5 | 26 | 41.5 | 52 | 62 | 75 | 98 | |
|
Rated output current (A) |
3.4 | 4.8 | 6.2 | 8 | 14.5 | 21 | 28 | 34 | 54 | 67 | 80 | 98 | 128 | |
|
Motor rated current (A) |
1.6 | 3.1 | 4.2 | 7 | 9.8 | 13.3 | 19.9 | 26.5 | 38.6 | 52.3 | 65.6 | 79.7 | 95 | |
|
The maximum output voltage |
Three-phase 345~480V (corresponding to input voltage) |
|||||||||||||
|
Reated output frequency |
400Hz | |||||||||||||
|
Output characteristics |
Standard 380/440 class |
H1000 | H1250 | H1500 | H2000 | H2500 | H3000 | H4000 | H5000 | H6000 | H7000 | H8000 | H10000 | H12000 |
|
Motor (KW) |
75 | 90 | 110 | 160 | 185 | 220 | 300 | 375 | 450 | 525 | 600 | 750 | 900 | |
|
Inverter capacity (KVA) |
130 | 160 | 170 | 230 | 260 | 340 | 460 | 600 | 660 | 800 | 900 | 1143 | 1371 | |
|
Rated output current (A)165 |
165 | 206 | 224 | 300 | 340 | 450 | 600 | 750 | 800 | 910 | 1030 | 1300 | 1500 | |
|
Motor rated current (A) |
130 | 156 | 190 | 270 | 310 | 370 | 500 | 600 | 700 | 830 | 950 | 1180 | 1400 | |
|
The maximum output voltage |
Three-phase 345~480V (corresponding to input voltage) |
|||||||||||||
|
Reated output frequency |
400Hz | |||||||||||||
|
Power supply |
Reated onput voltage and frequency |
Three-phase 380~440V 50/60Hz |
||||||||||||
|
Allowable voltage fluctuation |
+10%,-15% | |||||||||||||
|
Allowable frequency fluctuation |
±5% | |||||||||||||
|
Control characteristics |
Control mode |
Sine wave PWM mode selectable by parameter setting (1) V / F control (2) V / F control attached PG feedback (3) Current speed sensorless flux vector control (4) flux vector current control PG feedback |
||||||||||||
|
Starting torque |
150% / zero rpm (150%/1Hz without PG) |
|||||||||||||
|
Speed control range |
1: 1000 ( 1: 100 without PG) |
|||||||||||||
|
Speed control accuracy |
± 0.02% (± 0.2% without PG) |
|||||||||||||
|
Speed response |
30Hz (33ms) (5Hz (200ms) without PG ) |
|||||||||||||
|
Torque limit |
0.01 to 3600 seconds (acceleration, deceleration time set individually) | |||||||||||||
|
Torque Control |
Four-quadrant operation(Motorize forward / reverse, Motorize backward / reverse) |
|||||||||||||
|
Torque response |
40Hz (25ms) ( 20Hz (50ms) without PG ) |
|||||||||||||
|
Frequency control range |
0.01~400Hz |
|||||||||||||
|
Frequency control accuracy (temperature change) |
Digital signal: ± 0.01% (-10 ℃ ~ + 40 ℃) Analog signal: ± 0.1% (25 ℃ ± 10 ℃) |
|||||||||||||
|
Frequency setting resolution |
Digital signal: 0.01Hz Analog signals: 0.03Hz / 60Hz * (12bit) |
|||||||||||||
|
Frequency output resolution |
0.01Hz |
|||||||||||||
|
Overload capacity |
150% of rated current for 1 minute PER10MIN @ 40 ℃ above |
|||||||||||||
|
Analog frequency setting signal |
DC-10~+10V,0~10V(20KΩ)4 ~ 20mA(250Ω) |
|||||||||||||
|
Acceleration and deceleration time |
0.01 to 6000.0 seconds (four groups of acceleration, deceleration time set individually) |
|||||||||||||
|
Brake torque |
Approx. 20% additional brake up to 150% |
|||||||||||||
|
Run / stop setting |
Operator, RS232, RS485 / 422, the control circuit terminals, 12/16 Bit binary signal |
|||||||||||||
|
Protective function |
Motor protection |
Electronic thermal relay protection, phase failue protection |
||||||||||||
|
Instantaneous overcurrent |
Stop at approx.200% of rated output current |
|||||||||||||
|
Fuse FusingProtection |
The motor stops running after the fuse blows |
|||||||||||||
|
Overload |
The motor stops running if 150% of rated output cirrent at 1 minute PER 10MIN @40℃ |
|||||||||||||
|
Overvoltage |
220V-The motor stops running if the DC voltage of the main circuit is over 400V |
|||||||||||||
|
Low voltage |
220V-The motor stops running if the DC voltage of the main circuit is over 200V |
|||||||||||||
|
Instantaneous power-off offset |
The motor continues running after blackouts in 2 seconds(external capacitor) |
|||||||||||||
|
Overheat |
Thermocouple Protection |
|||||||||||||
|
Stall prevention |
Stall prevention during acceleration and deceleration |
|||||||||||||
|
Ground protection |
Electronic circuit protection |
|||||||||||||
|
Charging indication |
The charging indicator turns on when the DC voltage of the main circuit is over 50V |
|||||||||||||
|
Vibration |
Below 20Hz 1G, 20 ~ 50Hz: 0.2G |
|||||||||||||
|
Efficiency |
Pf≧0.95&η≧0.95@40℃ above |
|||||||||||||
(Download specification of Inverter TG600)
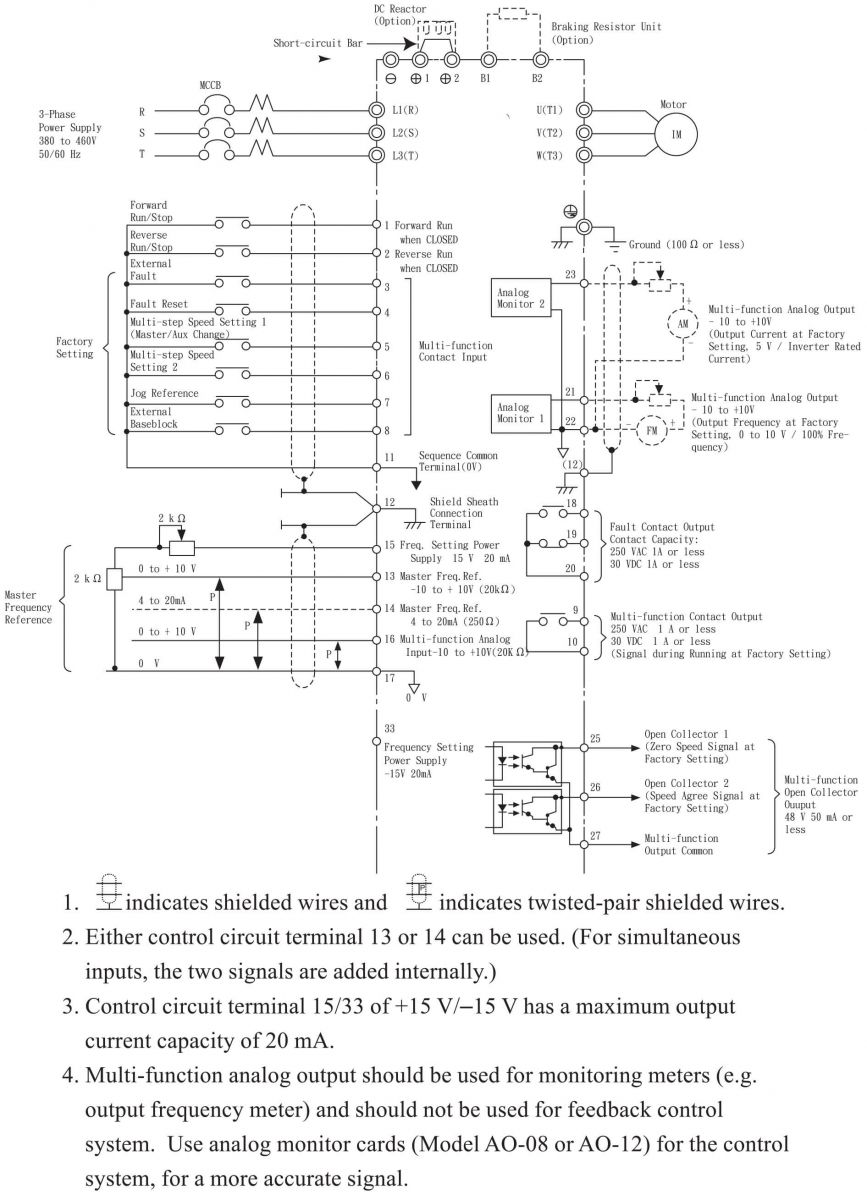
【WIRING】
● Below is connection diagram of the main circuit and control circuit. Notify the terminal number when wiring.
.jpg)
【CONNECTION DIAGRAM】
- The inverter standard diagram below only requires main circuit terminal (R, S and T are for power input; U, V and W are for motor input) for digital operator.
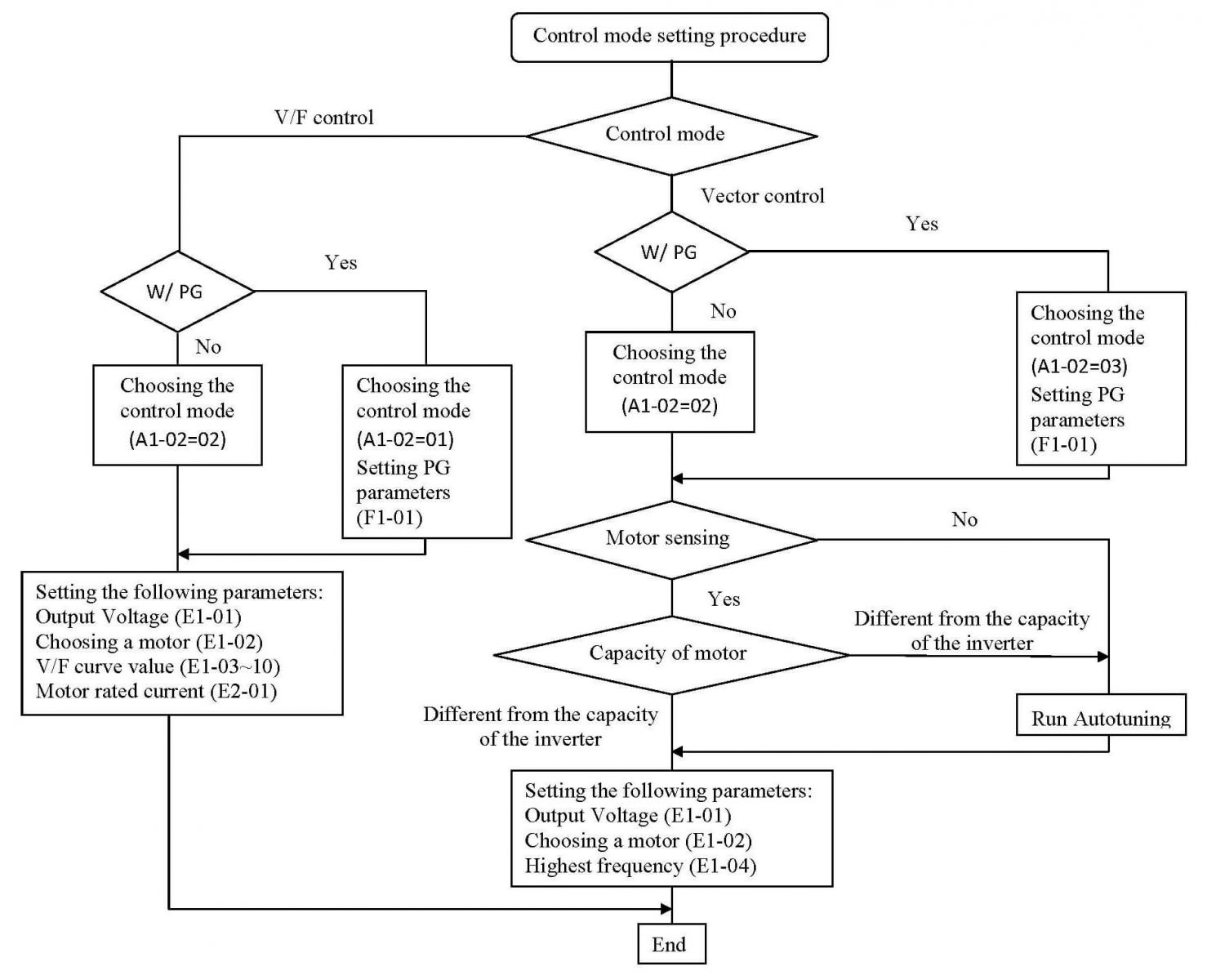
【Control Mode Setting】Four Optional Control Modes:
- TG600 inverter provides 4 types of control modes: 1. Current vector without PG control. 2. Current vector with PG control. 3. V/F control without PC. 4. V/F control with PG. The users based on their application needs may choose the suitable control mode with digital operator.
- The default of an inverter is current vector without PG control. Please follow the procedure below and set the control mode and relevant parameters before using TG600 inverter.
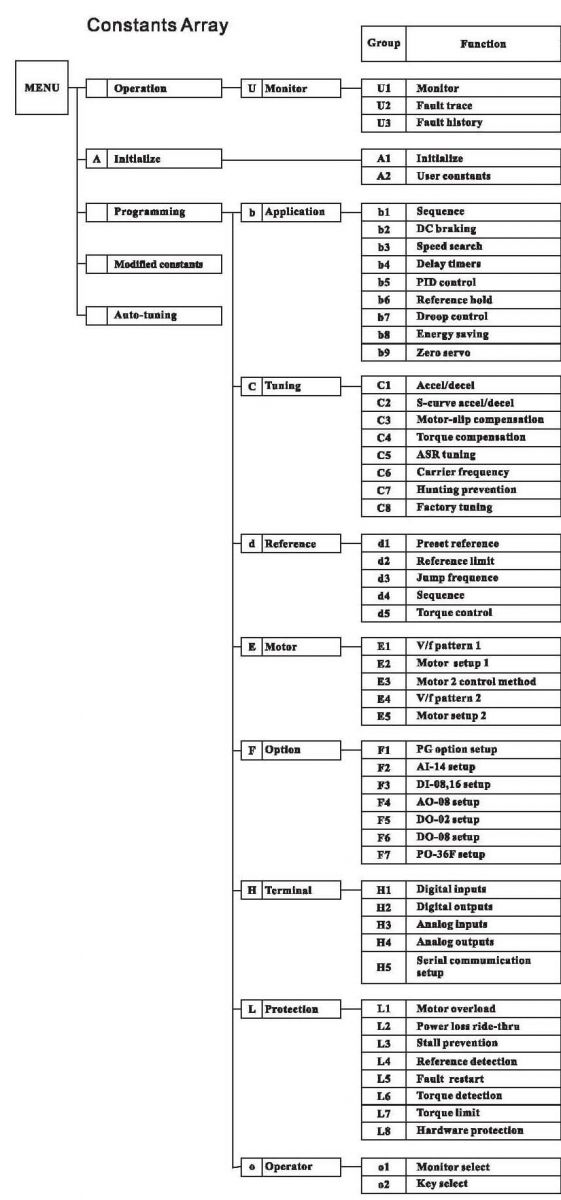
【CONSTANTS LIST】
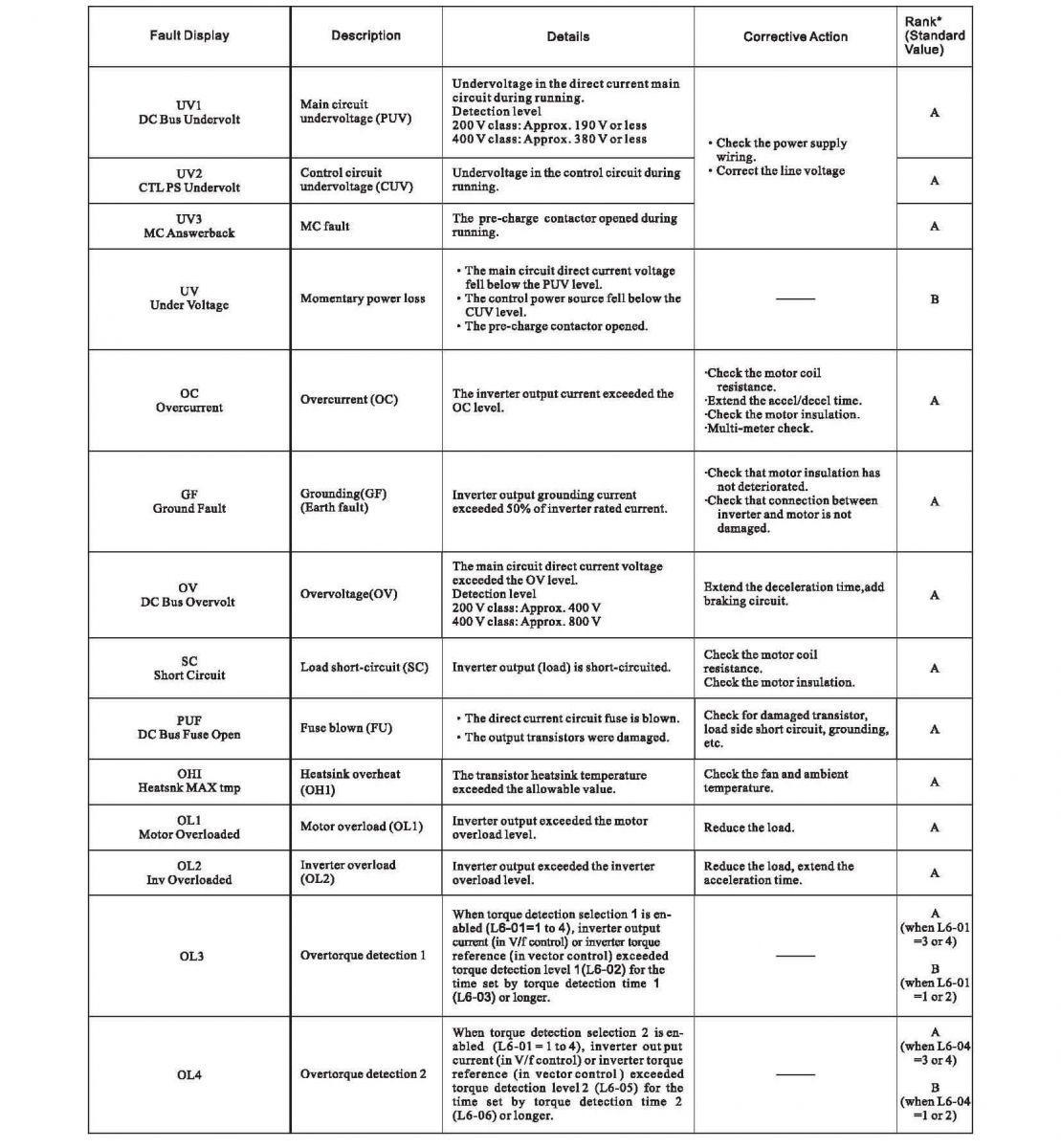
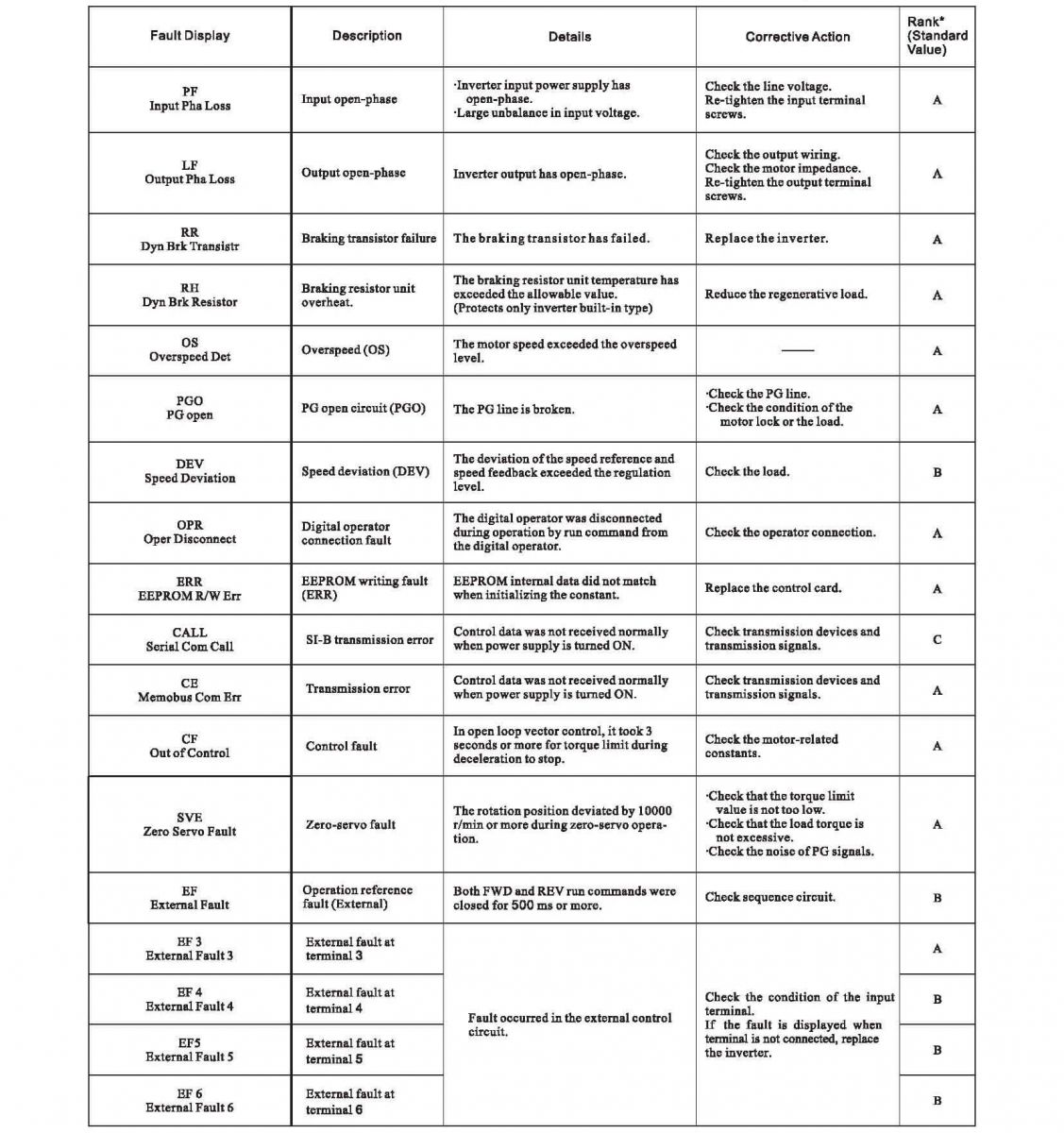
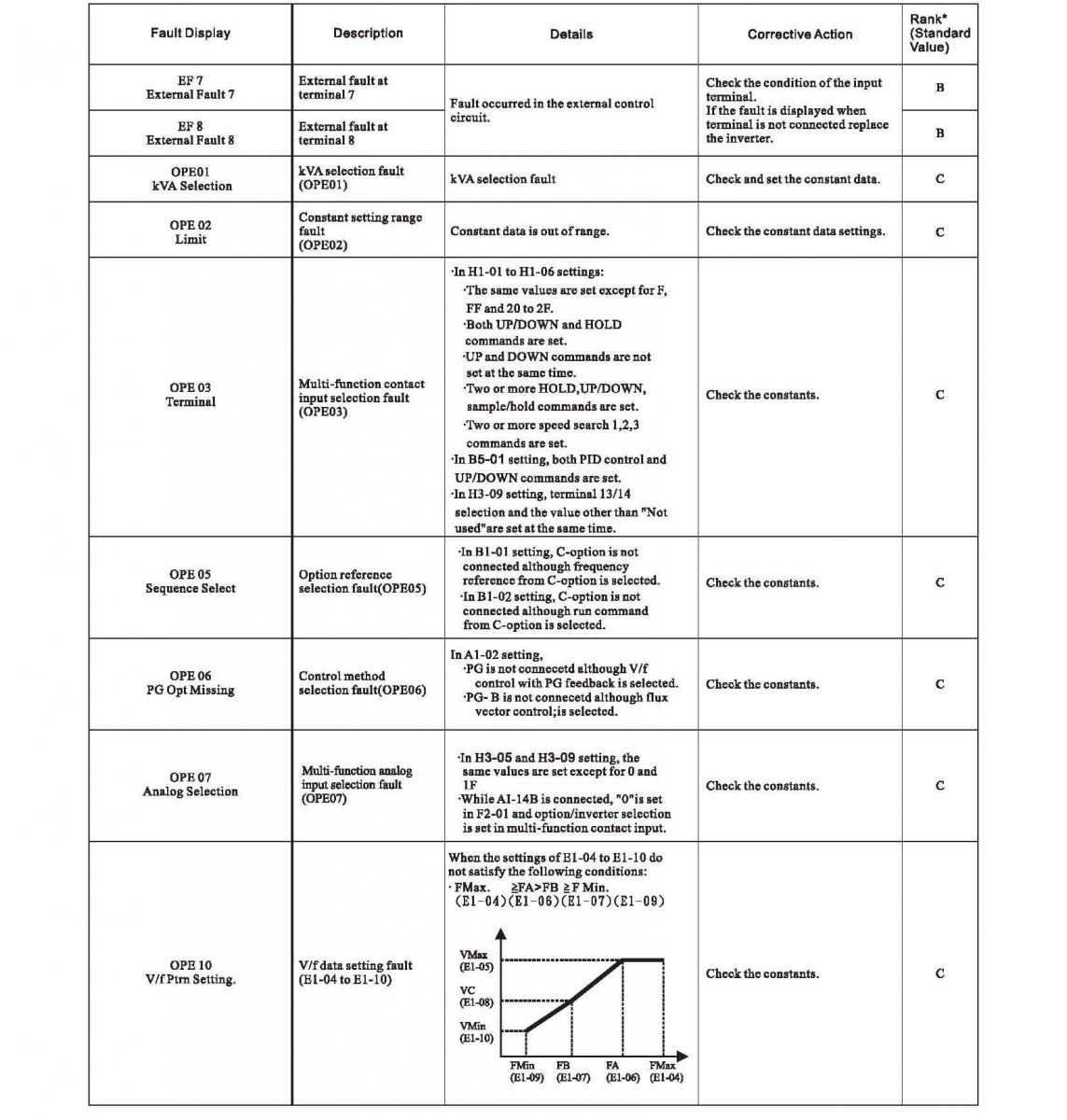
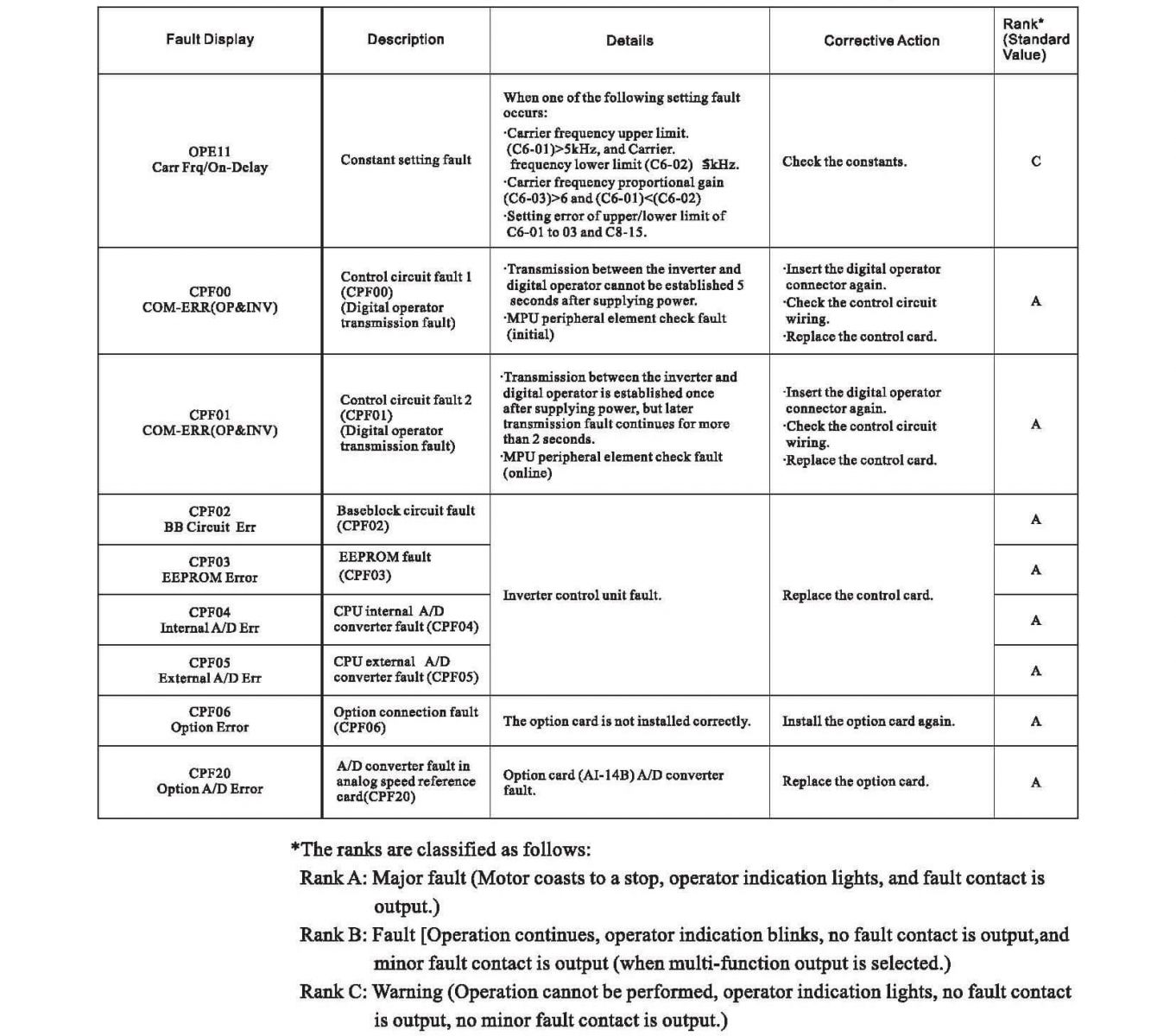
【FAULT DIAGNOSIS AND CORRECTIVE ACTIONS】