TG600 INVERSOR VECTOR DE CORRIENTE
/
Inversor
Model: TG600
Inverter
【Rendimiento】
● TG módulo 600 cuenta con la totalidad de su curso de control vectorial de flujo magnético. Sobre la base de la teoría de control moderna, con la revisión y control de vectores de la tecnología de flujo magnético controla directamente el par de la máquina eléctrica para funcionar a baja velocidad (1 por ciento de la revolución nominal). Se puede proporcionar el par de alta elevación y garantizar un funcionamiento libre de accidentes, incluso sin PG circuito cerrado. Como se mejora el control PG, esta podría proporcionar con cero velocidad y control de par completo.
1. Rango de control de velocidad de alto par en baja velocidad sin PG 1: 100 (PG para 1: 1000)
2. Control de par fiable
- TG600 inversor controla la salida de par a través de la función de límite de par precisa. En caso de que suceda cualquier avería, se puede garantizar el funcionamiento seguro y evitar de cualquier impacto. TG600 inversor evidencia su durabilidad y rendimiento perfecto en la aplicación de la máquina de trabajo pesado
3. Respuesta excepcional Servo
- Los casos de control vectorial de flujo con circuito cerrado PG
- TG600 inversor cuenta con su máxima velocidad y operación altamente precisa, incluso bajo la condición de cambio de carga.
- un control persistente velocidad de la luz a la pesada carga (sin PG) Velocidad tasa de detección de ± 0,2% de la carga de 0-100% (PG para ± 0,02)
- Un inversor contiene cuatro tipos de métodos de control: Estándar V / F, control V / F con PC de circuito cerrado, control de vector de flujo actual sin un control de sensor y vector de flujo con PG circuito cerrado.A través del parámetro opcional sencilla, TG600 módulo puede ser aplicado ampliamente en diferentes campos de la máquina servo altamente precisa para la conducción de los múltiples sistemas de la máquina eléctrica. Ayuda al usuario para estandarizar cada aplicación a través de un inversor.
- El valor por defecto de un inversor es el control vectorial de flujo de corriente sin sensor.
- Para la conducción de múltiples máquina eléctrica, el inversor se puede establecer como método de control V / F. operación vector altamente precisa puede ser cumplida basada en el electromotor con PG.
- En el caso de control de PG, se requiere la tarjeta de control de velocidad PG.
- Para una operación continua con un alto par a baja velocidad, por favor utilice Top Gin inversor profesional
- Proporciona un rendimiento excepcional en coche, aplicaciones industriales ricos, baja tasa de fracaso, de fácil mantenimiento. Ayudan a los usuarios de energía para ahorrar costos de operación de manera eficiente y para mejorar la competitividad.
- Ventaja de su sistema estable, tamaño compacto, de fácil instalación, aplicación flexible y de calidad confiable
- Funciona en modo de flujo, lo que permite una respuesta rápida y precisa de control de posicionamiento servo y el control de velocidad, lo que resulta en un par máximo incluso a velocidad cero.
- Velocidad cero con el 150% del par de retención, mientras que el control de posición puede llegar a punto a punto y la longitud relativa de la función de aplicación, el más adecuado para la alta - aplicaciones de maquinaria industrial finales.
- Para hacer frente a las aplicaciones de carga pesada / de impacto, para lograr una respuesta rápida, segura y un funcionamiento estable
- Diseño modular para facilitar el mantenimiento y muchas extensiones
- las unidades de control del vector de campo orientado generales (FOC: control orientado a campo)
-
Para mejorar la velocidad de computación y apoyar a motor con control vectorial de corriente de alto rendimiento.
-
Capacidades de comunicación y se pueden utilizar para el control de alta precisión.
- Parámetros del motor y optimización automáticas de control de vectores generalizada
- función de auto-tuning, ayudar a los usuarios a reducir el tiempo de preparación de masas
【FUNCIÓN】
- Soporta Abrir Cerrar / control de bucle de motores y el modo de control de velocidad / par / posición
- Frecuencia de salida: 0 ~ 400 Hz (modelos estándar)
- Opcional Filtro EMC integrado
- Opcionales ranuras incorporadas hacen expansión S, tarjeta de E / PG y tarjeta de comunicación de instalación
- Senseless control de vectores 150% de par a 0,5 Hz, la relación de velocidad de 1: 100
- Cuando se utiliza junto con la función de realimentación de velocidad, el par de retención puede llegar a 150%
- Sobrecarga: hasta el 150% en un minuto, dos segundos hasta un 200%
- Los parámetros del motor y la capacidad de carga puede estimarse
- Excelente control de par cuatro cuadrantes y la limitación de par
- Baja tensión de compensación transitoria
- Protección completa de alarma: el exceso de corriente, voltaje regenerativo, sobrecalentamiento del motor, el sobrecalentamiento de los módulos IGBT
- tecnología de modulación de bajo nivel de ruido
- De alta precisión de detección de corriente y larga vida, tolerancia ambiental mejorada y precisa y rápida de lograr la protección perfecta
- Cumple con los estándares de seguridad, incluyendo CE, UL y cUL
- RS-485 interfaz de comunicación (RJ-45) con el protocolo MODBUS
- velocidad preestablecida de 16 velocidades y operación programable 15 velocidades
- Cuatro grupos de aceleración y deceleración y aceleración de selección independiente y desaceleración S Selección de la curva
- Construido en función del sueño / reactivación
- máquina de perforación, Carolina del Norte torno, máquinas textiles, máquinas para trabajar la madera, compresores de aire, la aplicación de la grúa, medio y bajo de invitados velocidad de elevación, Máquinas herramientas, máquinas herramienta, el control de Sistema de prensado, máquinas de embalaje, electrodomésticos, ventiladores, bombas, máquina formadora de PCB
|
Cracterísticas de las salidas |
Estándar de la clase 220 |
L15 | L20 | L30 | L50 | L75 | L100 | L150 | L200 | L300 | L400 |
|
Motor (KW) |
0.75 | 1.5 | 2.2 | 3.7 | 5.5 | 7.5 | 11 | 15 | 22 | 30 | |
|
Capacidad del convertidor (KVA) |
2.3 | 2.5 | 4.3 | 6.8 | 9.9 | 13.5 | 19.5 | 24.5 | 37.5 | 51 | |
|
Corriente nominal de salida (A) |
6 | 8 | 11 | 18 | 26 | 34 | 50 | 65 | 96 | 132 | |
|
Corriente nominal del motor (A) |
3.3 | 6.2 | 8.5 | 14 | 19.6 | 26.6 | 39.7 | 53 | 77.2 | 105 | |
|
El voltaje de salida máximo |
Trifásica 200 ~ 240V (que corresponde a la tensión de entrada) |
||||||||||
|
Frecuencia de salida reated |
400Hz | ||||||||||
|
Cracterísticas de las salidas |
Estándar de la clase 380 |
L500 | L600 | L750 | L1000 | L1250 | L1500 | L1750 | L2000 | L2500 | L3000 |
|
Motor (KW) |
37 | 45 | 55 | 75 | 94 | 110 | 109 | 160 | 185 | 225 | |
|
Capacidad del convertidor (KVA) |
62 | 70 | 85 | 110 | 138 | 165 | 193 | 230 | 260 | 312 | |
|
Corriente nominal de salida (A) |
163 | 183 | 224 | 330 | 413 | 485 | 525 | 600 | 700 | 840 | |
|
Corriente nominal del motor (A) |
3.3 | 6.2 | 8.5 | 14 | 19.6 | 26.6 | 39.7 | 53 | 77.2 | 105 | |
|
El voltaje de salida máximo |
Trifásica 200 ~ 240V (que corresponde a la tensión de entrada) |
||||||||||
|
Frecuencia de salida reated |
400Hz | ||||||||||
|
Fuente de alimentación |
Reated onput tensión y frecuencia |
Trifásica 200 ~ 240V 50 / 60Hz |
|||||||||
|
Fluctuación de tensión admisible |
+10%,-15% | ||||||||||
|
Fluctuaciones de frecuencia admisibles |
±5% | ||||||||||
|
Cracterísticas de las salidas |
Estándar de la clase 380/440 |
H15 | H20 | H30 | H50 | H75 | H100 | H150 | H200 | H300 | H400 | H500 | H600 | H750 |
|
Motor (KW) |
0.75 | 1.5 | 2.2 | 3.7 | 5.5 | 7.5 | 11 | 15 | 22 | 30 | 37 | 45 | 55 | |
|
Capacidad del convertidor (KVA) |
2.6 | 3.7 | 4.7 | 6.7 | 12 | 16 | 21.5 | 26 | 41.5 | 52 | 62 | 75 | 98 | |
|
Corriente nominal de salida (A) |
3.4 | 4.8 | 6.2 | 8 | 14.5 | 21 | 28 | 34 | 54 | 67 | 80 | 98 | 128 | |
|
Corriente nominal del motor (A) |
1.6 | 3.1 | 4.2 | 7 | 9.8 | 13.3 | 19.9 | 26.5 | 38.6 | 52.3 | 65.6 | 79.7 | 95 | |
|
El voltaje de salida máximo |
Trifásico de 345 ~ 480V (que corresponde a la tensión de entrada) |
|||||||||||||
|
Frecuencia de salida reated |
400Hz | |||||||||||||
|
Cracterísticas de las salidas |
Estándar de la clase 380/440 |
H1000 | H1250 | H1500 | H2000 | H2500 | H3000 | H4000 | H5000 | H6000 | H7000 | H8000 | H10000 | H12000 |
|
Motor (KW) |
75 | 90 | 110 | 160 | 185 | 220 | 300 | 375 | 450 | 525 | 600 | 750 | 900 | |
|
Capacidad del convertidor (KVA) |
130 | 160 | 170 | 230 | 260 | 340 | 460 | 600 | 660 | 800 | 900 | 1143 | 1371 | |
|
Corriente nominal de salida (A) |
165 | 206 | 224 | 300 | 340 | 450 | 600 | 750 | 800 | 910 | 1030 | 1300 | 1500 | |
|
Corriente nominal del motor (A) |
130 | 156 | 190 | 270 | 310 | 370 | 500 | 600 | 700 | 830 | 950 | 1180 | 1400 | |
|
El voltaje de salida máximo |
Trifásico de 345 ~ 480V (que corresponde a la tensión de entrada) |
|||||||||||||
|
Frecuencia de salida reated |
400Hz | |||||||||||||
|
Fuente de alimentación |
Reated onput tensión y frecuencia |
Trifásico de 380 ~ 440V 50 / 60Hz |
||||||||||||
|
Fluctuación de tensión admisible |
+10%,-15% | |||||||||||||
|
Fluctuaciones de frecuencia admisibles |
±5% | |||||||||||||
|
características de control
|
Modo de control |
Modo PWM de onda sinusoidal seleccionable por ajuste de parámetros (1) V / F control (2) V / F control de retroalimentación adjunta PG (3) El flujo sin sensor de control del vector de velocidad actual (4) El control vectorial de flujo corriente de realimentación PG |
||||||||||||
|
Par de arranque |
150% / cero rpm (150%/1Hz sin PG) |
|||||||||||||
|
Rango de control de velocidad |
1: 1000 ( 1: 100 sin PG) |
|||||||||||||
|
La precisión de control de velocidad |
± 0.02% (± 0.2% sin PG) |
|||||||||||||
|
Velocidad de respuesta |
30Hz (33ms) (5Hz (200ms) sin PG ) |
|||||||||||||
|
Límite de par |
0.01 a 3600 segundos (aceleración, tiempo de deceleración configurado en forma individual) | |||||||||||||
|
Torque Control |
Operación en cuatro cuadrantes (motorizar adelante / atrás, motorizar hacia atrás / hacia atrás) |
|||||||||||||
|
Respuesta de par |
40Hz (25ms) ( 20Hz (50ms) sin PG ) |
|||||||||||||
|
Rango de control de frecuencia |
0.01~400Hz |
|||||||||||||
|
Precisión en el control de frecuencia (cambio de temperatura) |
Señal digital: ± 0.01% (-10 ℃ ~ + 40 ℃) Señal analoga: ± 0.1% (25 ℃ ± 10 ℃) |
|||||||||||||
|
Resolución de ajuste de frecuencia |
Señal digital: 0.01Hz Señal analoga: 0.03Hz / 60Hz * (12bit) |
|||||||||||||
|
Resolución de salida de frecuencia |
0.01Hz |
|||||||||||||
|
Capacidad de sobrecarga |
de la corriente nominal durante 1 minuto PPR10MIN @ 40 ℃ encima |
|||||||||||||
|
Señal de ajuste de frecuencia analógica |
DC-10~+10V,0~10V(20KΩ)4 ~ 20mA(250Ω) |
|||||||||||||
|
La aceleración y deceleración |
0.01 a 6000.0 segundos (cuatro grupos de aceleración, tiempo de deceleración configurado en forma individual) |
|||||||||||||
|
El par de frenado |
Approx. 20% de freno adicional hasta el 150% |
|||||||||||||
|
Ejecutar / detener el establecimiento |
Operador, RS232, RS485 / 422, Los terminales del circuito de control, 12/16 Señal binaria de bits |
|||||||||||||
|
Función de protección |
Protección del motor |
Protección relé térmico electrónico, la protección de fase failue |
||||||||||||
|
Sobrecorriente instantánea |
Pare en approx.200% de la corriente nominal de salida |
|||||||||||||
|
Protección Fusible de Fusible |
El motor se detiene después de que el fusible se funde |
|||||||||||||
|
Sobrecarga |
El motor se detiene si el 150% de la potencia nominal cirrent a 1 minuto por 10 MIN @ 40 ℃ |
|||||||||||||
|
Sobretensión |
|
|||||||||||||
|
Baja tensión |
220V-El motor deja de funcionar si el voltaje de DC del circuito principal es superior a 200V 440V-El motor deja de funcionar si el voltaje de DC del circuito principal es superior a 400V |
|||||||||||||
|
Apagado instantáneo desplazamiento |
El motor continúa funcionando después de apagones en 2 segundos (condensador externo) |
|||||||||||||
|
Sobrecalentar |
Protección termopar |
|||||||||||||
|
La prevención de bloqueo |
Prevención de bloqueo durante la aceleración y desaceleración |
|||||||||||||
|
La protección del suelo |
La protección de circuitos electrónicos |
|||||||||||||
|
Indicación de carga |
El indicador de carga se enciende cuando la tensión de CC del circuito principal es de más de 50 V |
|||||||||||||
|
Vibración |
Abajo 20Hz 1G, 20 ~ 50Hz: 0.2G |
|||||||||||||
|
Eficiencia |
Pf≧0.95&η≧0.95@40℃ encima |
|||||||||||||
(Especificación de descarga de Inverter TG600)
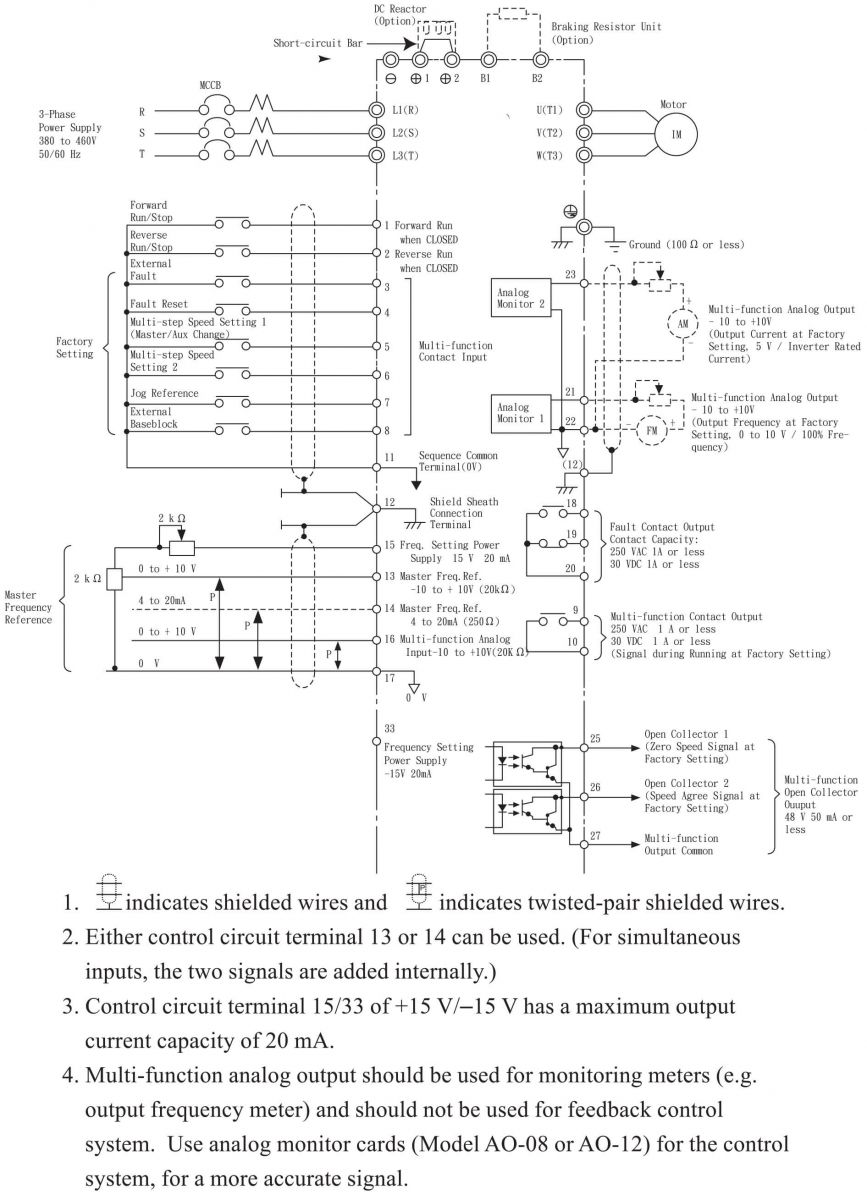
【ALAMBRADO】
- A continuación se muestra el diagrama de conexión del circuito y circuito de control principal. Notificar el número de terminal al realizar el cableado.
.jpg)
【ESQUEMA DE CONEXIÓN】
- El inversor diagrama estándar por debajo sólo requiere de terminales del circuito principal (R, S, T son para entrada de alimentación; U, V, W son para la entrada del motor) para el operador digital.
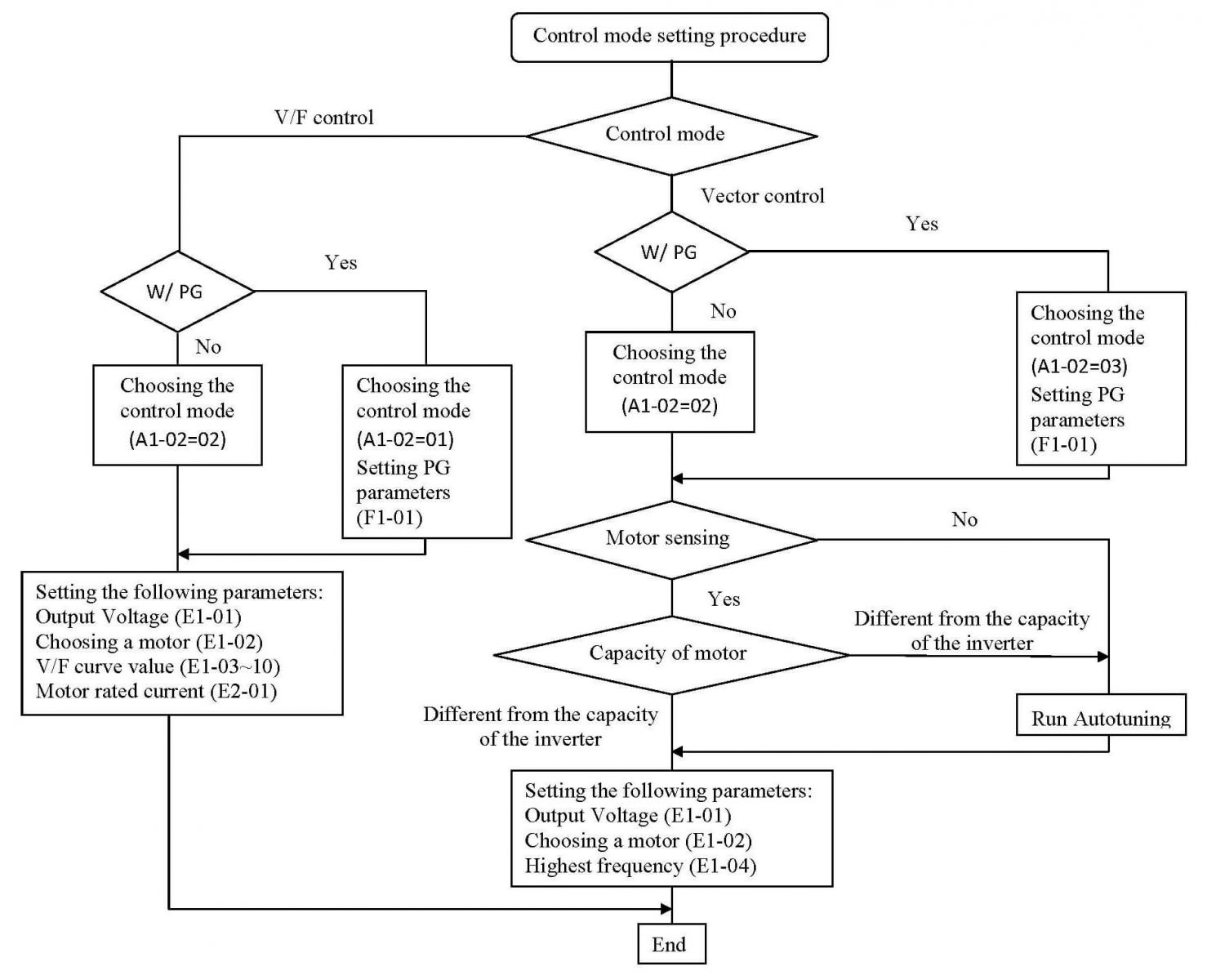
【Modo de control Marco】 Cuatro modos de control opcionales:
- TG600 inversor ofrece 4 tipos de modos de control: 1. vectorial de corriente sin control PG. 2. vectorial de corriente con control de PG. 3. Control V / F sin PC. 4. V / f con PG. Los usuarios en función de sus necesidades de aplicación puede elegir el modo de control adecuado con el operador digital.
- El valor por defecto de un inversor es el control vectorial de corriente sin PG. Por favor, siga el siguiente procedimiento y establecer el modo de control y los parámetros pertinentes antes de usar TG600 inversor.
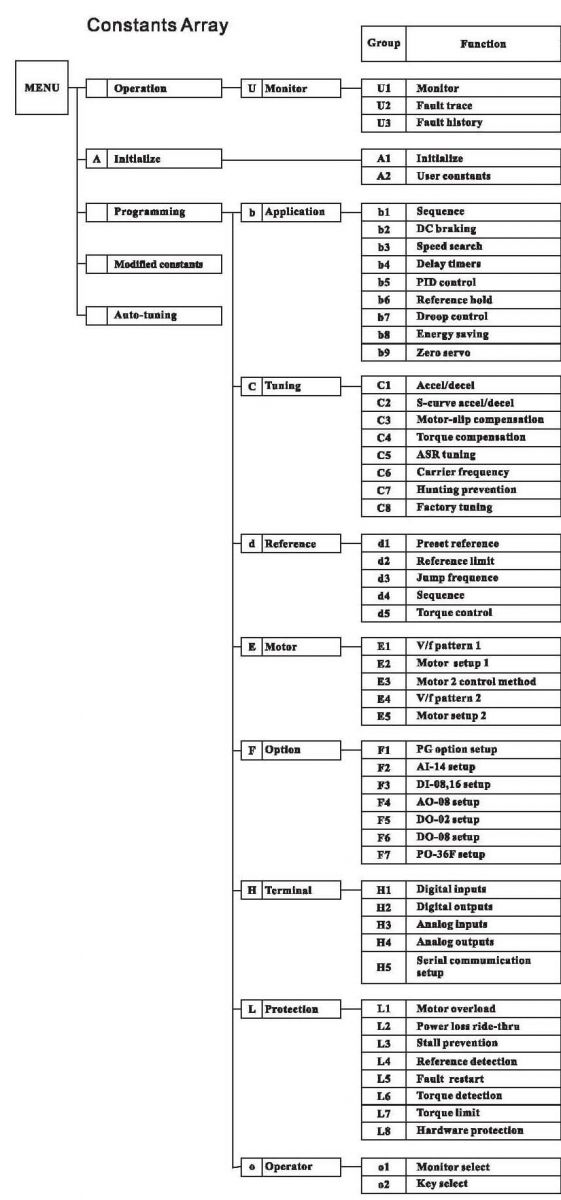
【CONSTANTES DE LISTA】
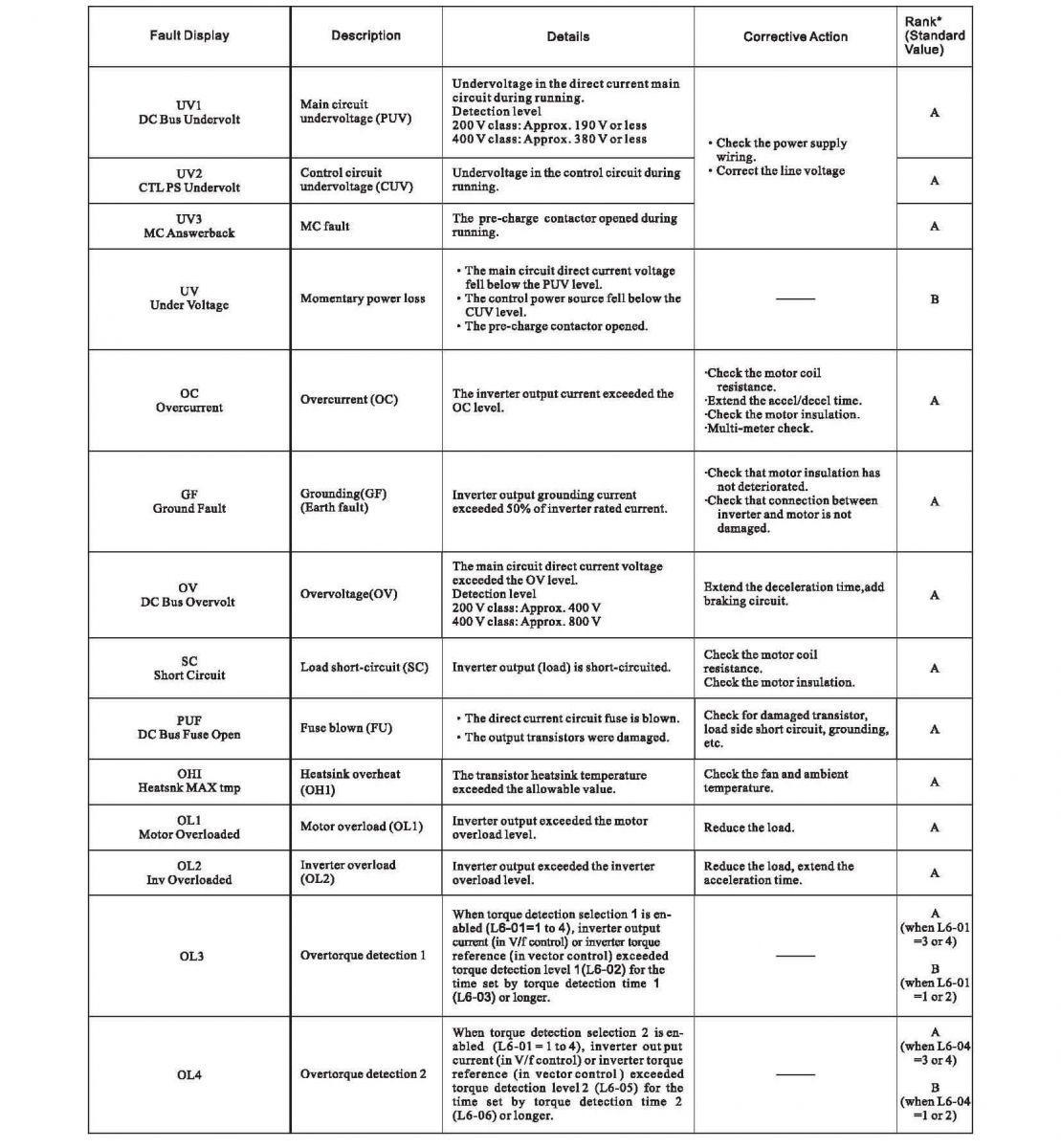
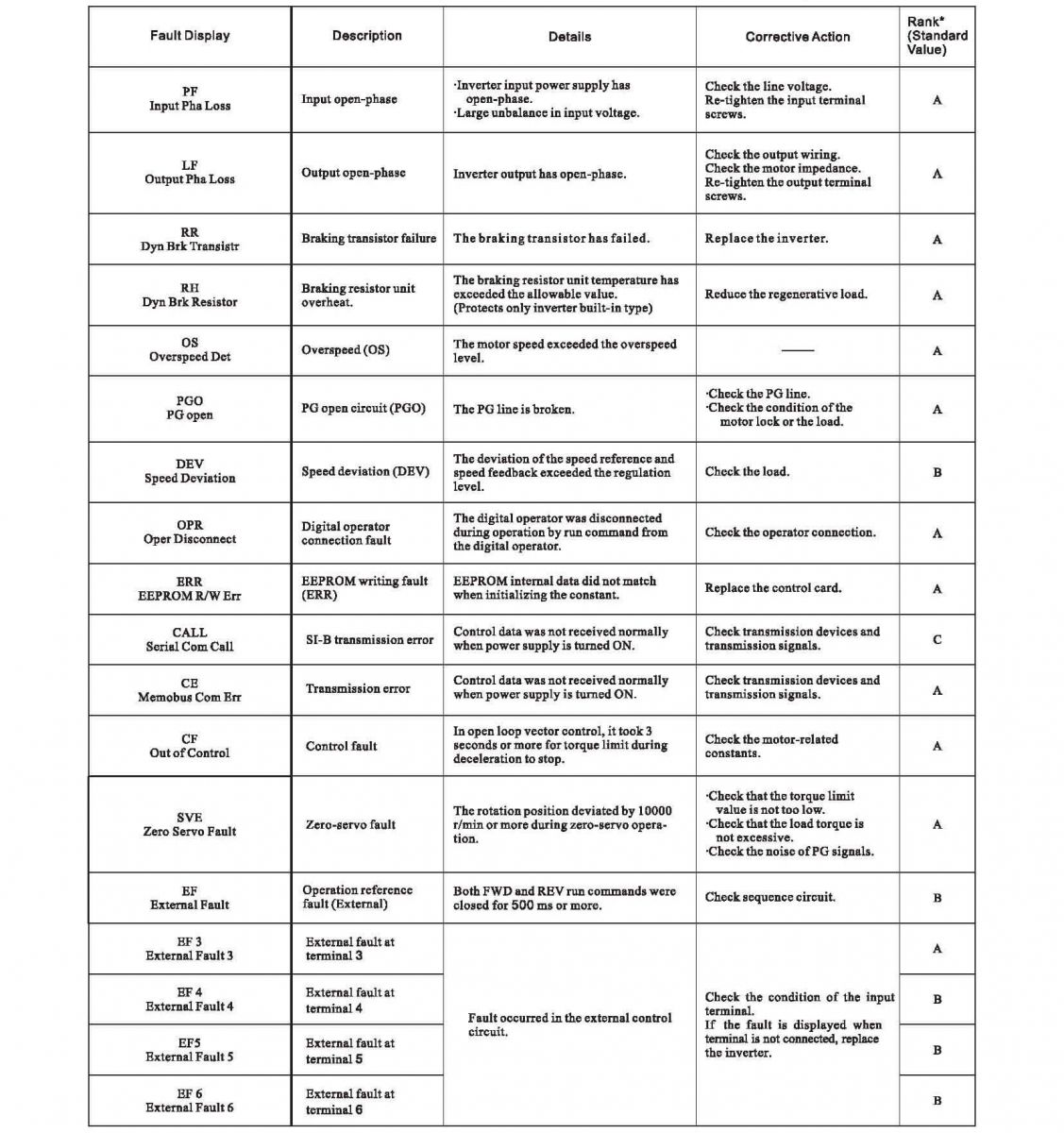
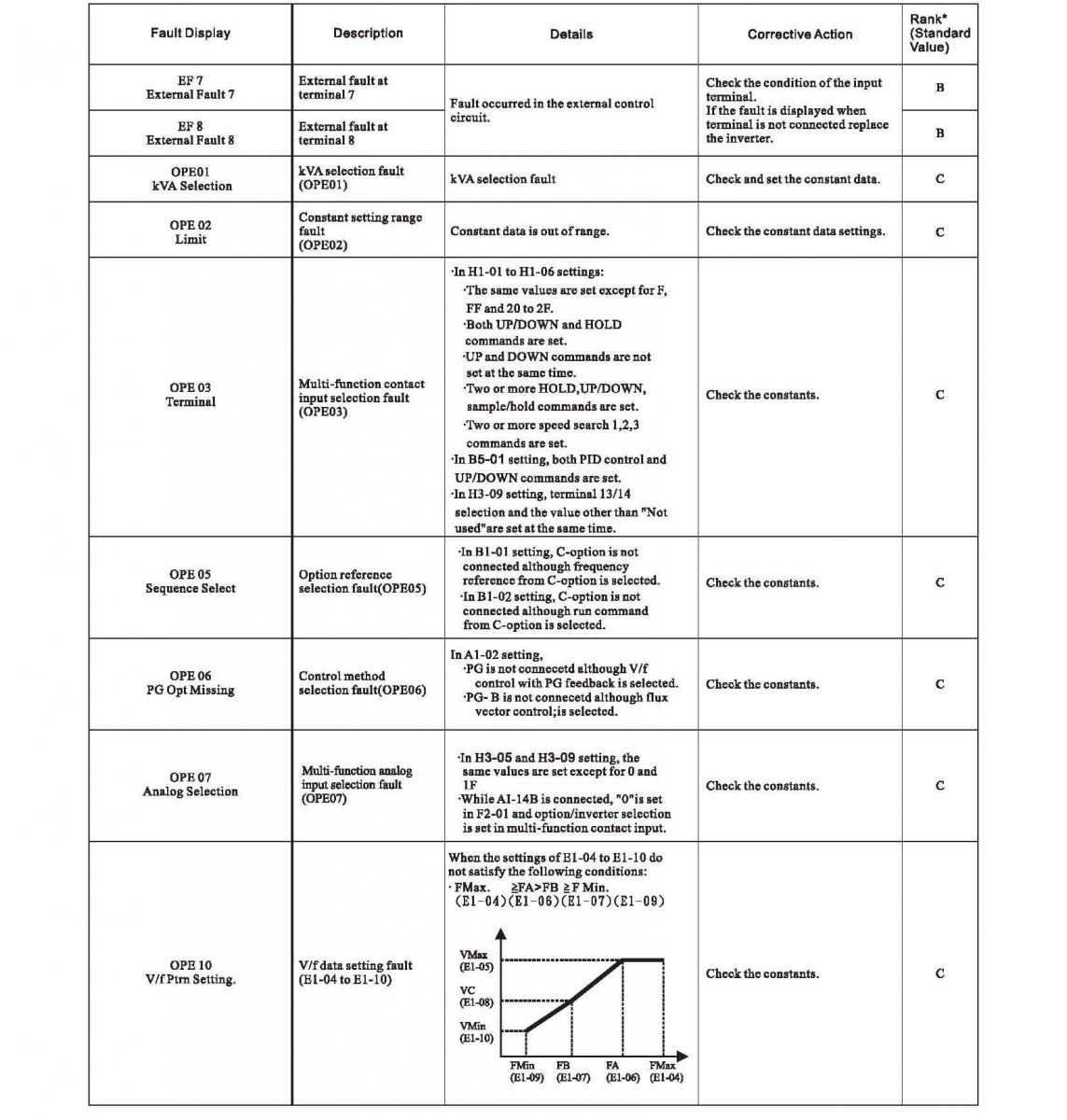
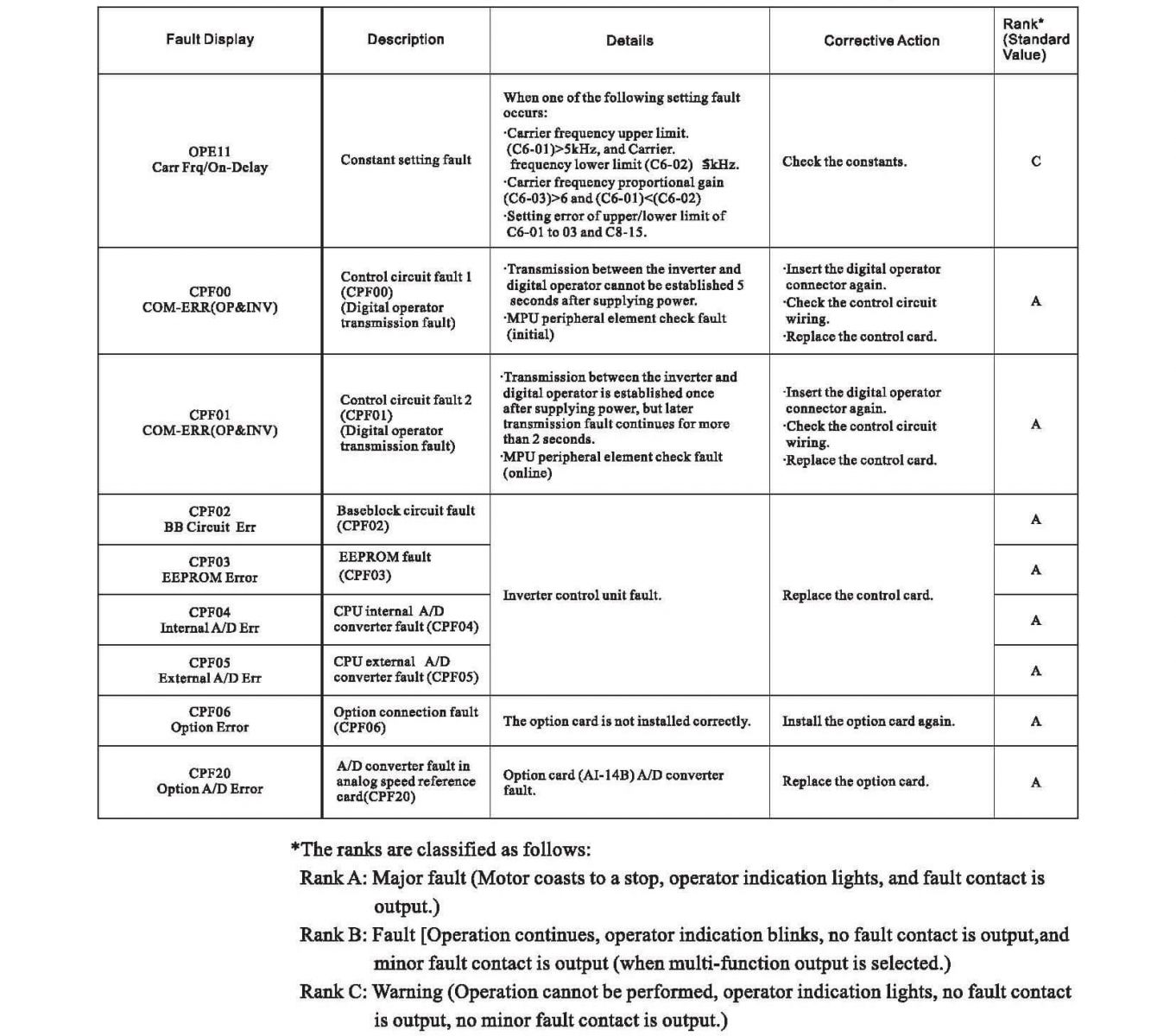
【DIAGNÓSTICO DE FALLAS Y ACCIONES CORRECTIVAS】
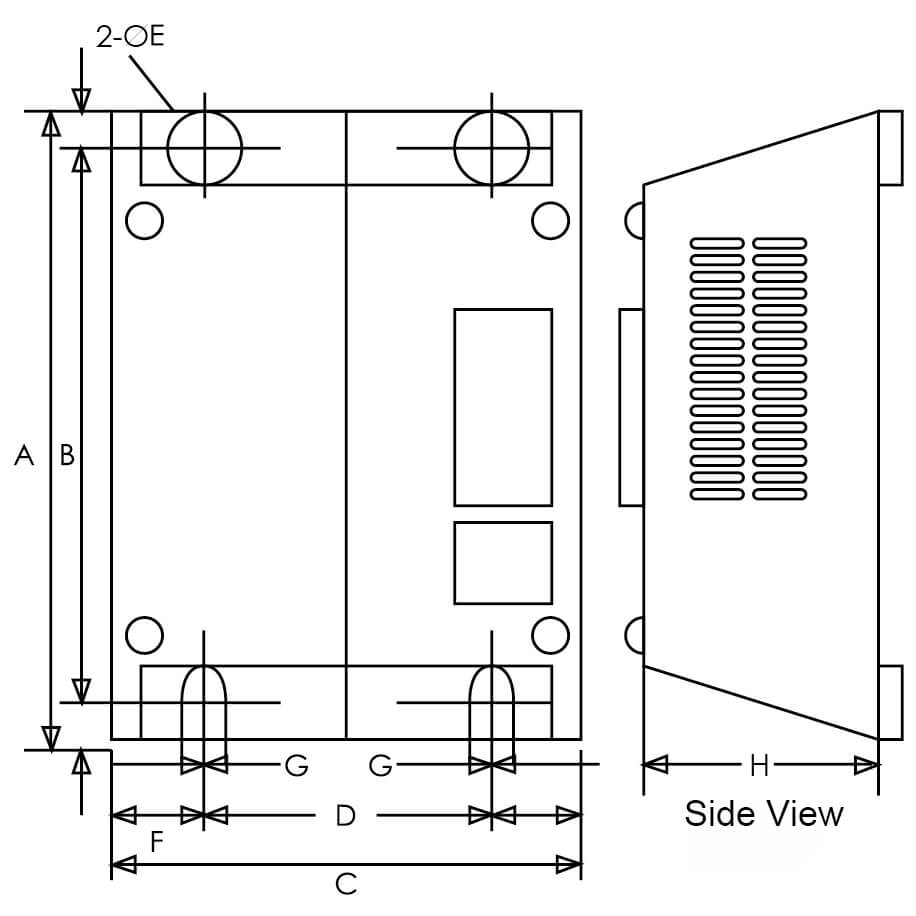
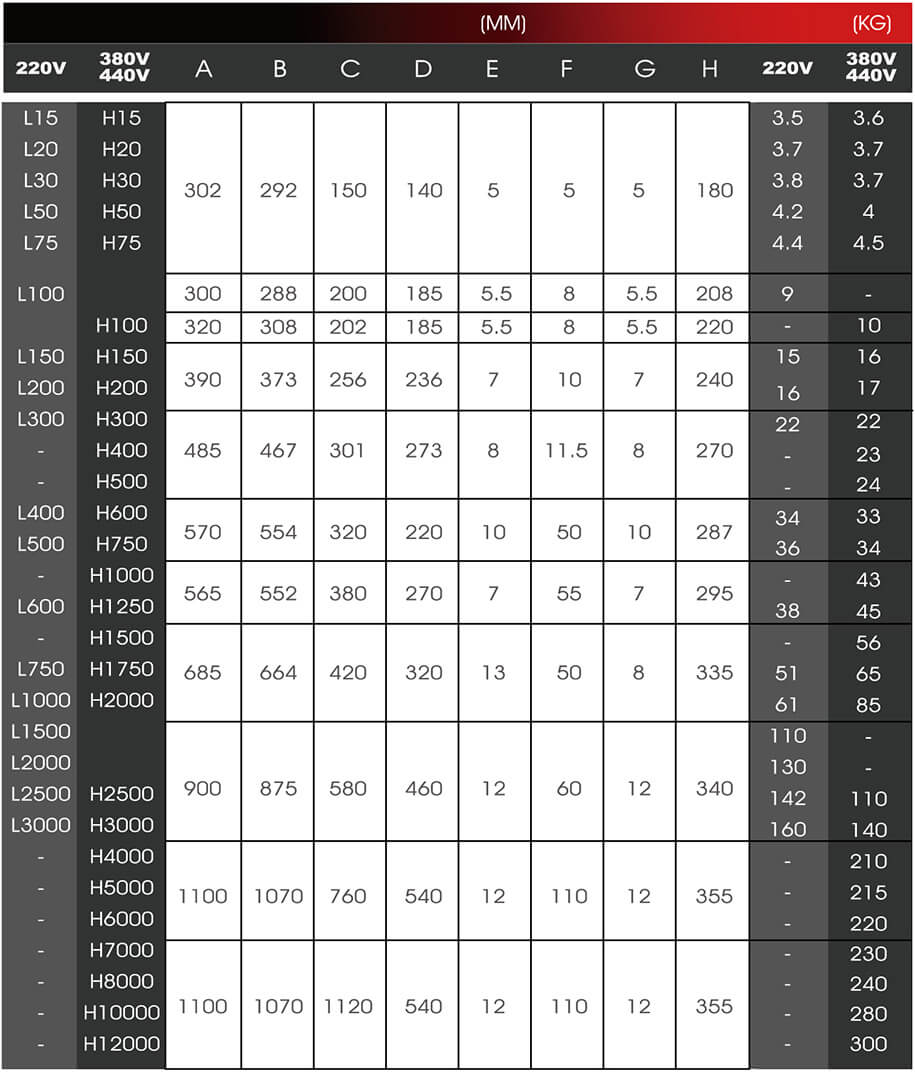
【DIMENSIONES】